 Figure 1
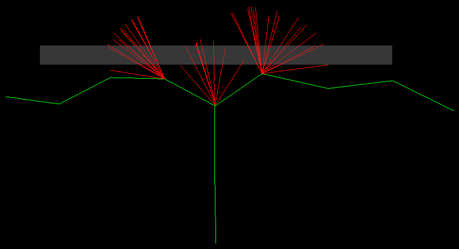
Figure 1 As a slight break from the light implementation I have started to work on collision avoidance. Now if a branch attempts to pass through an object the program will try and find an alternative direction for the branch. There is a restriction on the maximum rotation that the branch is allowed to be adjusted by. In figure one shows the final branch in green as well as the attempted paths in red.
In the implementation of this I have managed to implement a small bug. The problem is with the implementation of self collision. The problem has been identified though I have yet to solve it. The problem affects the growth order of the branches and can be seen in Figure 2. The tree should branch at the stem but it does not. Solving this problem will be the next item I am going to work on.
In the implementation of this I have managed to implement a small bug. The problem is with the implementation of self collision. The problem has been identified though I have yet to solve it. The problem affects the growth order of the branches and can be seen in Figure 2. The tree should branch at the stem but it does not. Solving this problem will be the next item I am going to work on.
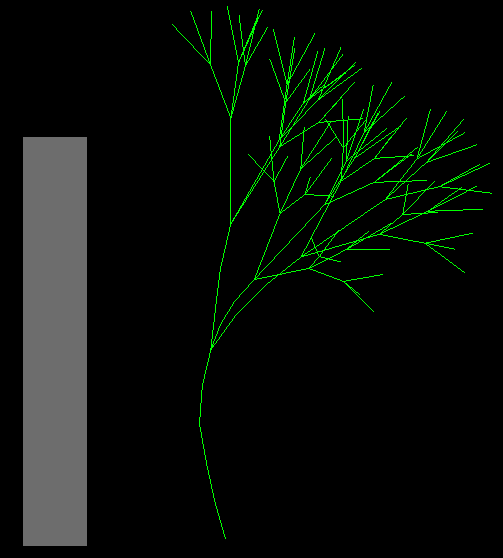
Figure 2
 RSS Feed
RSS Feed
